문제 링크
20055번: 컨베이어 벨트 위의 로봇 (acmicpc.net)
20055번: 컨베이어 벨트 위의 로봇
길이가 N인 컨베이어 벨트가 있고, 길이가 2N인 벨트가 이 컨베이어 벨트를 위아래로 감싸며 돌고 있다. 벨트는 길이 1 간격으로 2N개의 칸으로 나뉘어져 있으며, 각 칸에는 아래 그림과 같이 1부
www.acmicpc.net
컨베이어의 회전을 구현해서 내구도가 0인 칸이 K개 이상 생겼을 때 수행중이던 단계가 몇 단계인지 출력하는 문제.
풀이
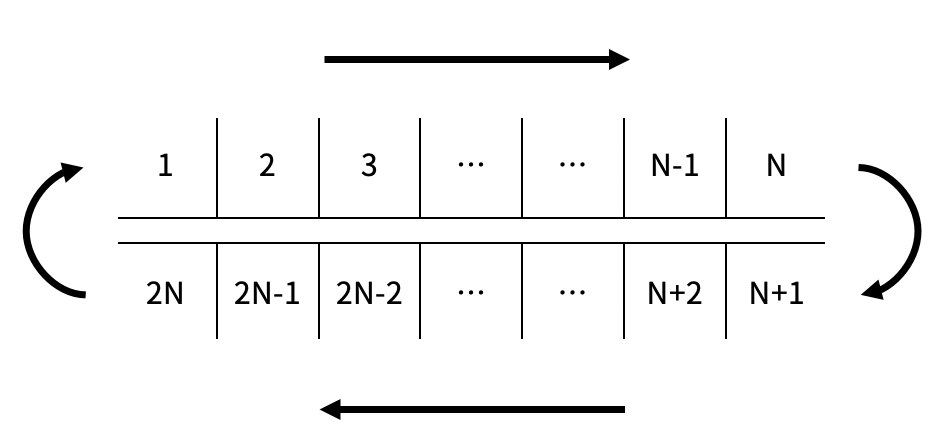
컨베이어는 위의 그림처럼 1부터 2N번째까지 칸으로 이루어져있고, 1번 칸을 "올리는 위치" 즉, 새로운 로봇을 올리는 위치이고, N번 칸을 "내리는 위치" , 로봇이 내려오는 위치이다.
컨베이어 벨트의 각 칸을 표현하는 방식은 여러가지가 될 것이다.
1. 2차원 배열을 이용해서 윗줄(1 ~ N), 아랫줄(N+1 ~ 2N)을 표현한다.
2. 1차원 배열을 이용해서 1 ~ 2N까지 표현한다.
3. 덱을 이용해서 1 ~ 2N까지 표현한다.
셋 중에서 회전을 표현하기에 가장 적합한 방식은 3번 덱을 이용하는 방법이라고 나는 생각했다.
덱은 큐와 비슷한 자료구조이지만 앞 뒤 모두에서 값을 꺼낼 수 있기때문에 회전을 표현하기 쉽다.
덱의 맨 뒤에서 값을 꺼내서 덱의 맨 앞칸에 넣어주면 한 칸씩 회전한 후의 상태가 된다.
함수를 구현하기 전에 최소한으로 필요한 정보는 세가지 정도가 되겠다.
- 해당 칸에 로봇이 이미 있는지에 대한 정보(①)
- 해당 칸의 내구도가 얼마인지에 대한 정보(②)
- 현재 로봇들의 위치에 대한 정보(③)
로봇이 이동하려면 이동하려는 칸에 로봇이 있으면 안되고 내구도가 1이상이어야 이동할 수 있다.
그리고 로봇을 순차적으로 이동시켜야하기 때문에 로봇의 위치를 올려진 순서대로 저장해 두어야한다.
컨베이어 각 칸마다 로봇의 유무와 내구도는 컨베이어가 회전함에 따라 같이 회전해야하므로 앞에서 말한대로 덱으로 만들어서 정보를 저장했다.
1. 컨베이어의 회전
컨베이어의 회전은 앞서 말했듯이 덱의 특성을 이용해서 쉽게 표현할 수 있다.
위의 ①, ② ,③ 번 정보를 모두 바꿔주어야한다. ①, ②번은 단순히 그냥 한 칸씩 회전 시켜주면 된다.
③번은 모든 로봇의 위치를 +1 시켜주고 만약 2N번째 로봇은 2N+1로 이동하는게 아니라 1번으로 이동한다.
그런데 나는 배열이 아닌 덱으로 표현했기 때문에 0번 인덱스부터 정보가 들어있다. 따라서 문제에 있는 사진에서 인덱스를 하나씩 작게 생각해야한다. 0번이 시작 인덱스이고 2N-1이 마지막 인덱스이다.
로봇이 2N번째 칸으로 이동하게 되면 0번 칸으로 이동시켜준다.
그리고 로봇이 이동했을 때 N-1 번째 칸. 즉 "내리는 위치"라면 로봇을 내려준다. 이때 N-1번째 칸의 로봇의 유무는 '무'로 바꿔준다.
2. 로봇의 이동
③번에 로봇들에 대한 정보가 저장되어있다. 이때 올려진 순서대로 로봇들에 대한 정보를 저장해두어야 문제 조건대로 로봇들을 이동시킬 수 있다. 0번 인덱스에 제일 먼저 올려진 로봇의 위치를 저장했다.
0번 인덱스부터 현재 올려져있는 로봇의 개수만큼 인덱스를 돌면서 만약 다음칸에 로봇이 없고, 내구도가 1이상이라면 로봇의 위치를 +1 해주고 다음칸의 내구도를 -1 해주었다.
만약 이동한 칸이 N-1번째 칸 "내리는 위치"라면 로봇을 내려야한다.
3. 로봇 올리기
로봇은 무조건 "올리는 위치"에만 올라가므로 컨베이어 0번 칸에 로봇을 올려준다.
이때 0번칸의 로봇 유무를 '유'로 바꿔주고, 0번칸의 내구도를 1 깎는다.
새로 들어온 로봇은 ③번 로봇 정보들 맨 뒤칸에 새로운 로봇에 대한 정보를 추가한다.
4. 내구도가 0인 칸 >= K 라면 종료
내구도의 변화가 생기는 과정은 2. 로봇의 이동, 3. 로봇 올리기 이다.
로봇을 이동시킬 때와 로봇을 올릴 때 해당 칸의 내구도를 깎았을 때 내구도가 0이면 내구도가 0인 칸의 개수를 +1 시켜준다.
내구도가 0인 칸의 개수가 K이상이면 종료하고 그때의 단계를 출력한다.
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
#define _CRT_SECURE_NO_WARNINGS
#include <iostream>
#include <cstdio>
#include <string.h>
#include <string>
#include <stack>
#include <vector>
#include <math.h>
#include <queue>
#include <climits>
#include <deque>
#include <algorithm>
#include <iomanip>
#include <map>
#define mod 998244353
using namespace std;
typedef long long ll;
typedef priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> Priority_queue;
const int INF = INT_MAX;
const int MAX_N = 100 + 5;
deque<int> A;
int N, K;
deque<bool> deq;
deque<int> Robot;
int Zero = 0;
void rotation();
void moving();
void Add_robot();
int main(void) {
ios_base::sync_with_stdio(false);
cin.tie(NULL);
cin >> N >> K;
for (int i = 0; i < 2 * N; i++) {
int a;
cin >> a;
A.push_back(a);
}
for (int i = 0; i < 2 * N; i++)
deq.push_back(false);
int turn = 0;
while (true) {
turn++;
rotation();
moving();
Add_robot();
if (Zero >= K)
break;
}
cout << turn << "\n";
return 0;
}
void rotation() {
deq.push_front(deq.back());
deq.pop_back();
A.push_front(A.back());
A.pop_back();
deque<int> Remain;
int idx = -1;
for (int i = 0; i < Robot.size(); i++) {
Robot[i]++;
if (Robot[i] >= 2 * N)
Robot[i] = 0;
if (Robot[i] == N - 1)
idx = i;
}
if (idx != -1) {
Robot.erase(Robot.begin() + idx);
deq[N-1] = false;
}
}
void moving() {
vector<int> idx;
for (int i = 0; i < Robot.size(); i++) {
int next = Robot[i] + 1;
if (next >= 2 * N)
next = 0;
if (A[next] > 0 && !deq[next]) { //다음칸으로 이동 가능하면
deq[Robot[i]] = false;
deq[next] = true;
Robot[i] = next;
A[next]--;
if (!A[next])
Zero++;
if (next == N - 1) {
deq[next] = false;
idx.push_back(i);
}
}
}
for (int i = 0; i < idx.size(); i++)
Robot.erase(Robot.begin() + idx[i]);
}
void Add_robot() {
if (A[0] <= 0)
return;
Robot.push_back(0);
A[0]--;
if (A[0] == 0)
Zero++;
deq[0] = true;
}
|
cs |

'백준 > Gold' 카테고리의 다른 글
| [BOJ] 20057 : 마법사 상어와 토네이도 (0) | 2022.05.30 |
|---|---|
| [BOJ] 20056 : 마법사 상어와 파이어볼 (0) | 2022.05.24 |
| [BOJ] 19238 : 스타트 택시 (0) | 2022.05.23 |
| [BOJ] 17825 : 주사위 윷놀이 (0) | 2022.05.19 |
| [BOJ] 17822 : 원판 돌리기 (0) | 2022.05.18 |